Промышленные 6-ти осевые роботы














- 1
- 2
Промышленные шестиосевые роботы стали важной составляющей производственных процессов во многих отраслях. Они расширяют возможности автоматизации и способны решать сложные задачи, благодаря чему занимают свою нишу в современном производстве, и мы предлагаем купить 6-осевых промышленных роботов для тех компаний, которые стремятся к высокой гибкости и эффективности.
Что такое промышленные шестиосевые роботы?
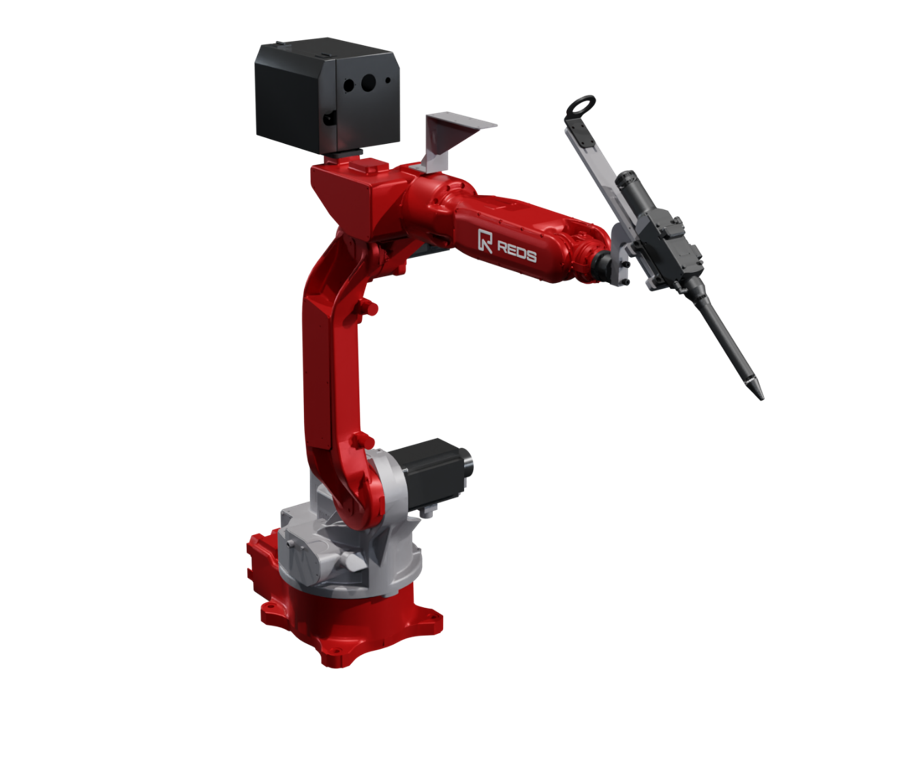
Шестиосевой робот манипулятор представляет собой тип автоматизированного оборудования, разработанный для выполнения сложных повторяющихся операций с высокой скоростью и точностью. Он имеет шесть степеней свободы, что позволяет ему двигаться в трехмерном пространстве по всем осям. Основное отличие 6-осевого робота манипулятора от других форм автоматизации заключается в его универсальности, гибкости и грузоподъемности. Ниже представлены основные характеристики, которые делают их неоценимыми в промышленной среде:
-
Шесть степеней свободы. Обеспечивают возможность манипуляций в затрудненных условиях;
-
Грузоподъемность. Способность поднимать тяжелые объекты, что часто требуется в производственных процессах;
-
Программируемость. Позволяет адаптировать робота под конкретные задачи.
Преимущества использования промышленных шестиосевых роботов
Основное преимущество использования подобного промышленного оборудования заключается в роботизации процессов, повышающей эффективность производства. Вот несколько ключевых причин, почему роботы становятся неотъемлемой частью производственной сферы:
-
Повышенная точность и повторяемость операций. Что позволяет значительно снизить количество человеческих ошибок.
-
Увеличение производительности. Результат способности выполнять задачи на более высоких скоростях.
-
Сокращение затрат на рабочую силу. Роботы могут работать круглосуточно без перерывов.
-
Приспособляемость. Возможность программировать на выполнение различных операций.
Типы промышленных шестиосевых роботов
Существует множество видов промышленных шестиосевых роботов, каждый из которых разработан под определенные задачи и окружение. Их отличия заключаются, главным образом, в конструкции, грузоподъемности и применении. Наиболее распространены следующие разновидности:
-
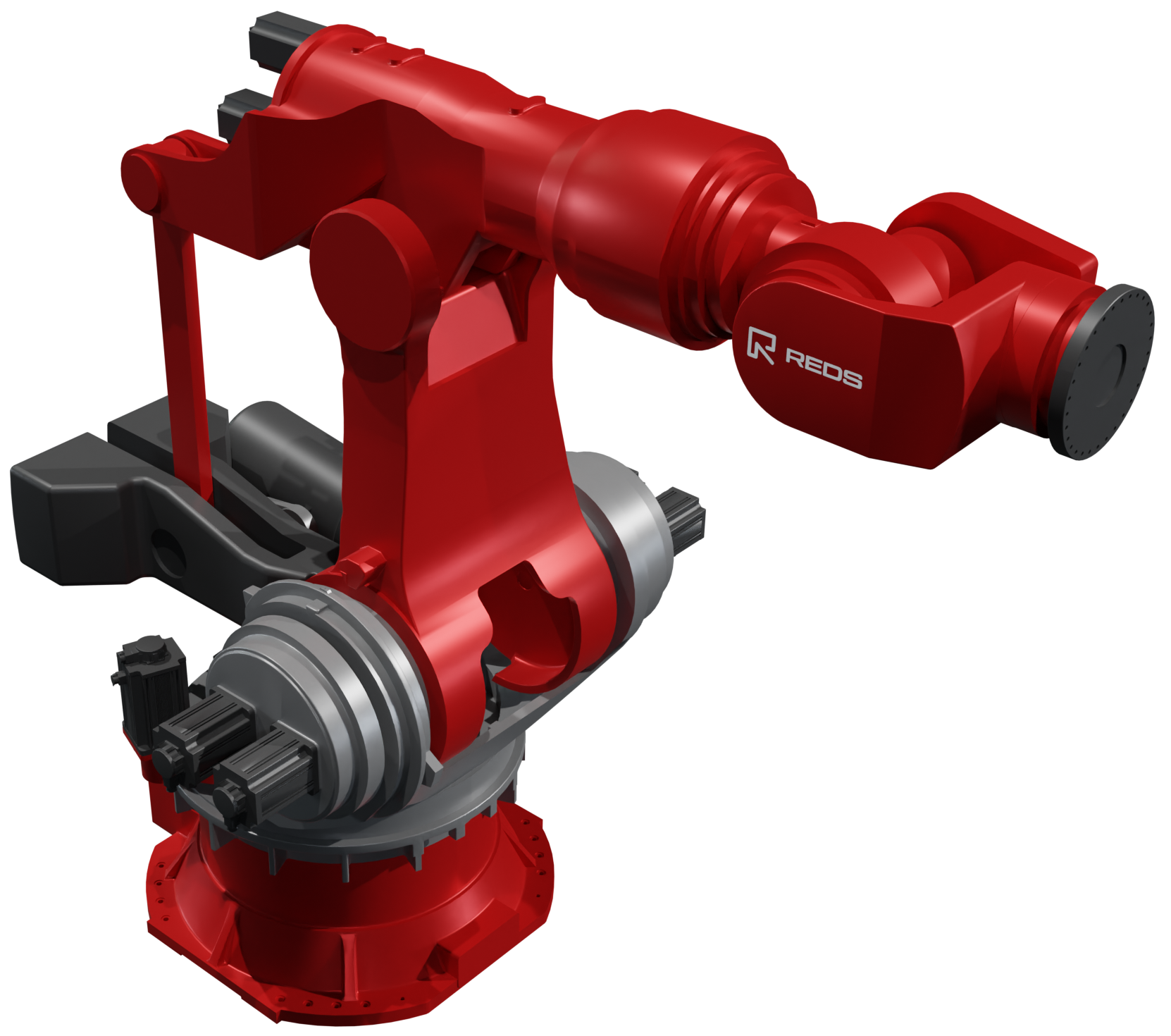
Шестиосевые роботы манипуляторы с повышенной грузоподъемностью. Используются в тяжелой промышленности для подъема и перемещения больших масс.
-
Компактные модели. Предназначены для работы в условиях ограниченного пространства.
-
Высокоскоростные роботы. Применяются в сфере, где важен быстрый отклик, например, на конвейерных линиях.
Области применения
Эти роботы находят применение в одной из множества отраслей, начиная от производства электроники, заканчивая автомобильной промышленностью. Их универсальность и возможность выполнять сложные задачи делает их важными участниками в различных сферах. Ввиду их универсальности можно выделить следующие области:
-
Автомобильная промышленность. Сборка, сварка, покраска деталей.
-
Электронная промышленность. Комплектация, монтаж мелких компонентов.
-
Металлообработка. Фрезеровка, сверление, резка.
-
Сельское хозяйство. Упаковка и сортировка продукции.
Современные промышленные шестиосевые роботы стали необходимыми элементами производственной цепочки благодаря своей способности адаптироваться к изменениям рынка и обеспечивать высокое качество выпускаемой продукции. В будущем, с учетом стремительного развития роботизации, они займут ещё большее место в разных отраслях, помогая людям справляться с самыми сложными задачами.
Технические характеристики и возможности
Промышленные шестиосевые роботы отличаются разнообразием в своих технических характеристиках, которые делают их подходящими для выполнения различных задач в промышленной среде. Основные возможности включают:
-
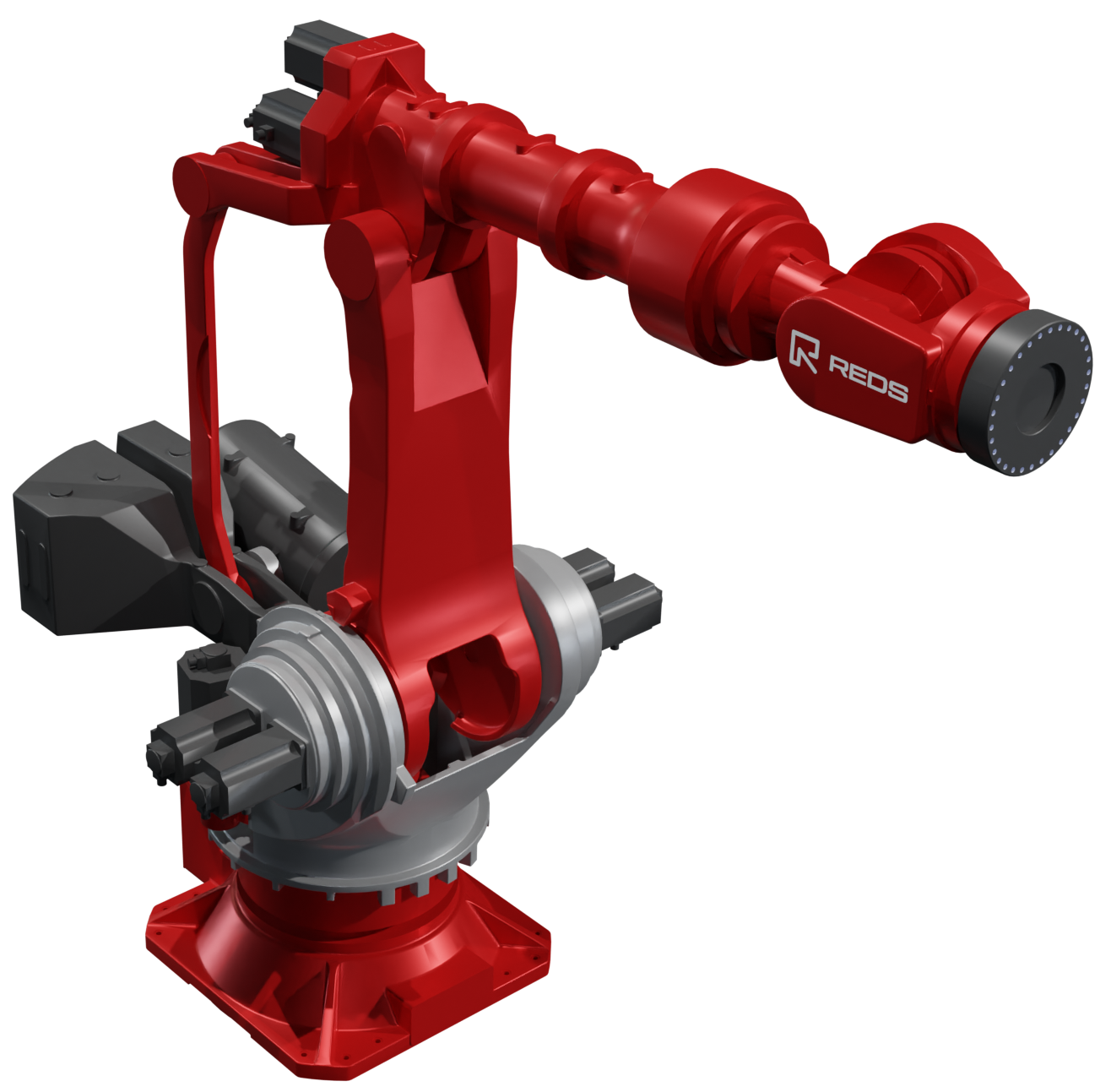
Грузоподъемность. Она варьируется от нескольких килограммов до нескольких тонн, позволяя использовать этих роботов как для легких, так и для тяжелых задач.
-
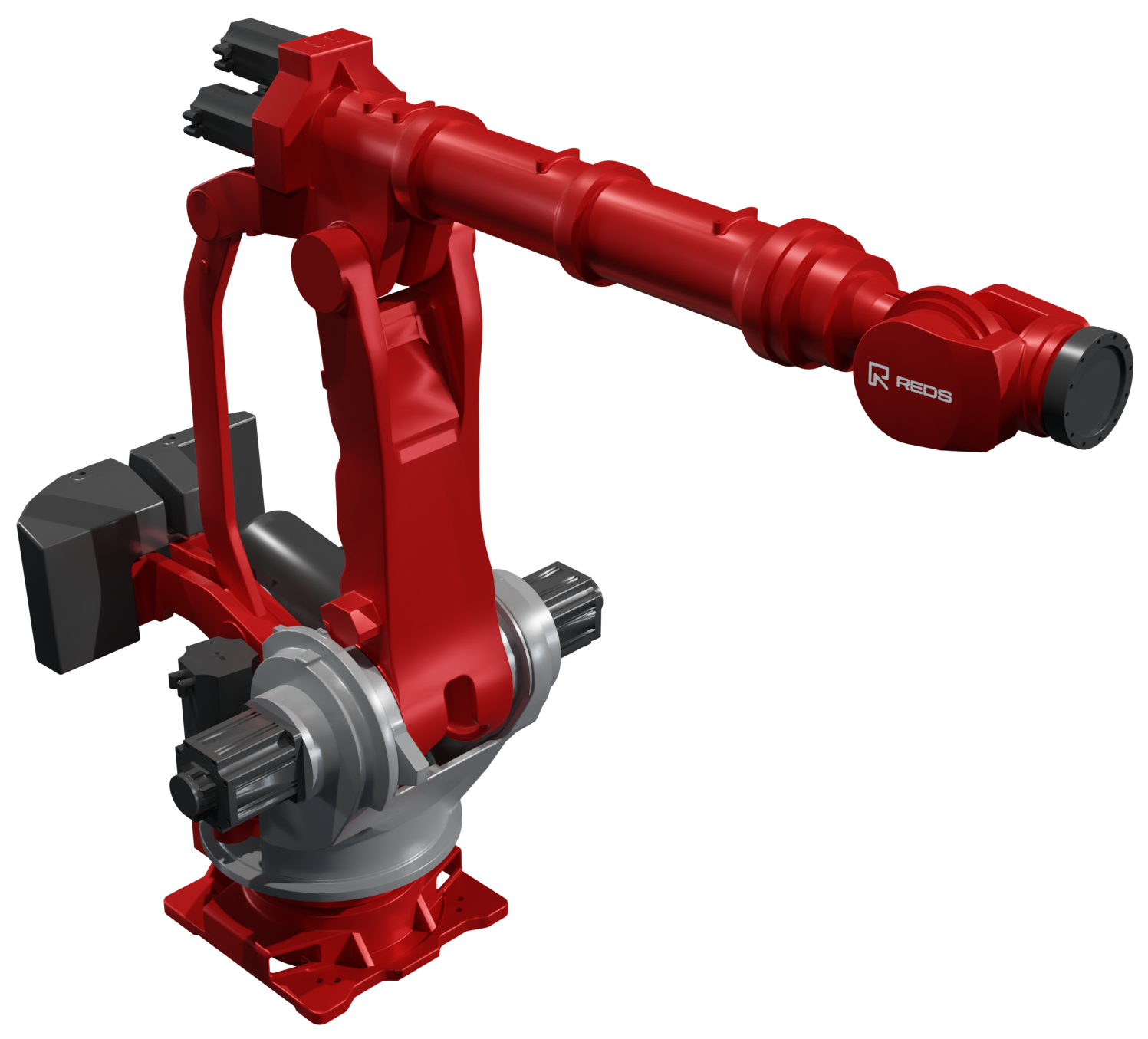
Диапазон движения. Широкие возможности перемещения дают роботам способность выполнять работу в труднодоступных местах.
-
Точность и повторяемость. Существенная характеристика, обеспечивающая высокое качество производства.
-
Скорость. Высокая скорость движений требует точности в управлении и программировании, позволяет значительно увеличивать производительность.
Возможности интеграции в производство
Интеграция роботов в производственную сферу предоставляет широкий диапазон возможностей для оптимизации процесса. Промышленные шестиосевые машины легко интегрируются с существующими системами благодаря следующим аспектам:
-
Открытые интерфейсы и протоколы. Обеспечивают совместимость с различными программными и аппаратными платформами.
-
Простота программирования. Современные роботы оснащены интуитивно понятными языками программирования и интерфейсами управления, что облегчает их настройку и оптимизацию.
-
Совместимость с различным оборудованием. Способность присоединяться к системам машинного зрения и сенсорным системам для улучшения контроля и управления процессами.
-
Модульность. Возможность наращивания функционала и грузоподъемности посредством дополнительных модулей и инструментов, что делает их более гибкими.
Решение купить промышленных шестиосевых роботов и интегрировать их в современное производство является важнейшим шагом для повышения эффективности и конкурентоспособности. Эти машины не только увеличивают производительность, но и обеспечивают более высокое качество продукции за счет точности и надежности. Повышенная роботизация способствует снижению затрат на рабочую силу и минимизации ошибок, что в конечном счете способствует оптимизации всего производственного процесса.
В заключение, нельзя не отметить, что такие роботы не просто облегчают производственные задачи, но и открывают новые возможности в сфере инновацией и развития, что делает их ключевым элементом промышленного прогресса.