
20 марта 2026
Роботизация процесса укладки в пищевой промышленностиКак REDCARGO 10 решил проблему дефицита кадров и пространства на кондитерском производстве.
Подробнее

Отправьте ТЗ на почту: SalesTR@technored.ru
Ответим вам в течении двух часов в рабочее время.


|
Пульт управления
|

|
Шкаф управления роботом
|

|
Высокопроизводительные прецизионные редукторы и серводвигатели
|

|
Сборка и покраска Качественная сборка роботов и покраска с соблюдением технологического процесса, надежно защищают оборудование от внешних повреждений, попадания пыли и грязи, во время эксплуатации. |

Защищенная конструкция с циркуляцией воздуха.
Наличие места для установки серводрайверов внешних осей.
Поддержка протоколов CanOpen, ModbusTCP, Ethernet IP
Два кнопочных поста для быстрого запуска программы.



Кнопки экстренного выключения для безопасной работы персонала.
Управление движениями и скоростью робота при помощи джойстика. Возможность последовательного реверсивного воспроизведения.
ПО с открытым исходным кодом. Возможность замены интерфейса.
Оснащен интерфейсом USB, поддерживает импорт/экспорт рабочих программ.
Степень защиты IP43
Вес 1,57 кг
Габариты 355 х 235 х 54 мм
Длина кабеля пульт-контроллер 4 м
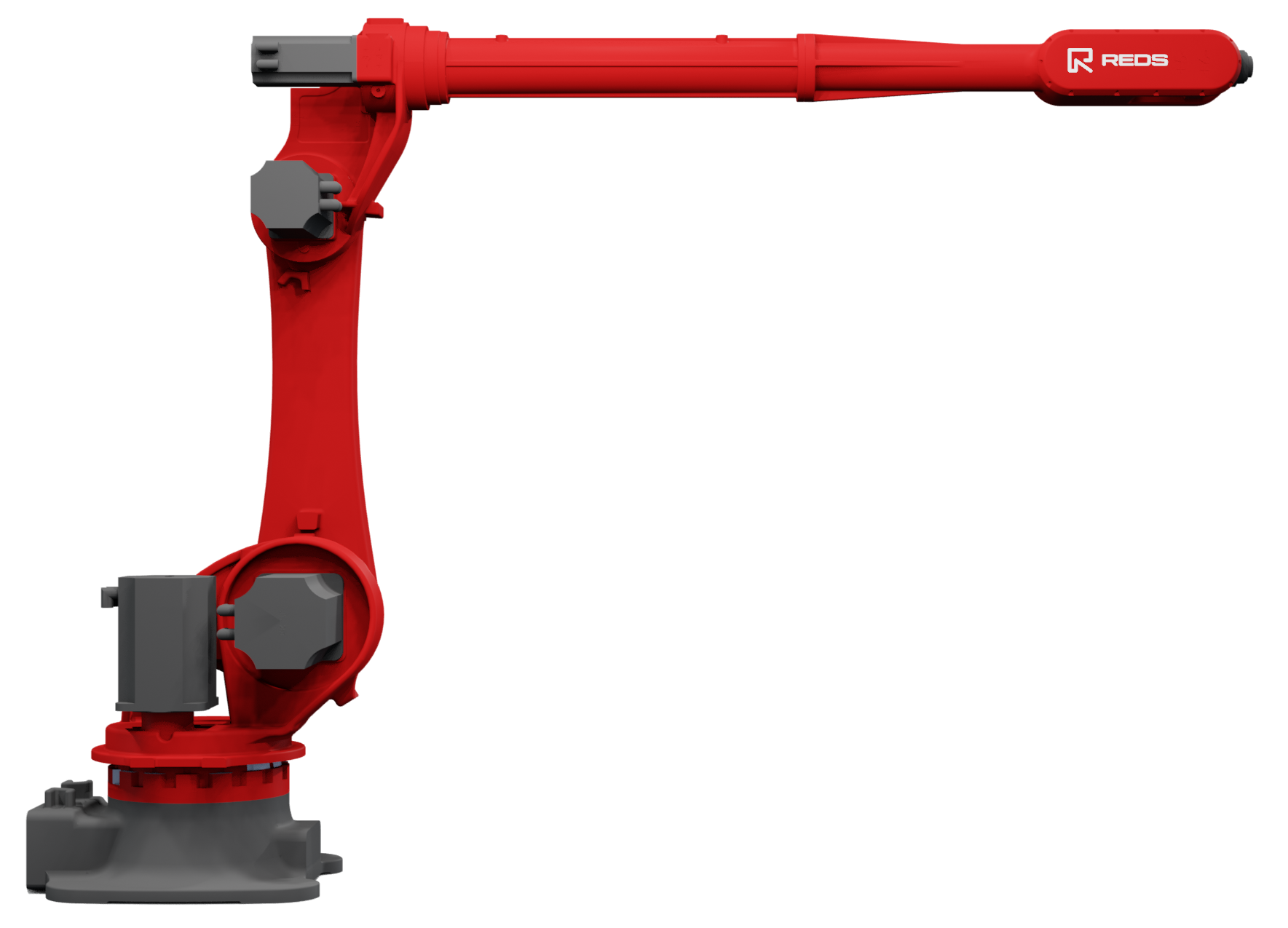
| Линейки продукции | REDS |
| Структура | Вертикально сочленённый |
| Досягаемость, мм | 3100 |
| Повторяемость позиционирования, мм | ±0,08 |
| Режим привода | Серводвигатель переменного тока |
| Степень защиты IP | IP54 |
| Размер основания, мм | 573х629 |
| Высота, мм | 1899 |
| Вес робота КГ. | 596 |
| Монтаж | Пол, стена, потолок |
| Потребляемая мощность, кВт | 4.5 |
| Условия эксплуатации | 0-45 |
| Максимальная скорость оси J2 г/с | 125°/с |
| Максимальная скорость оси J3 | 140°/с |
| Максимальная скорость оси J4 | 200°/с |
| Максимальная скорость оси J5 | 210°/с |
| Максимальная скорость оси J6 | 290°/с |
| Рабочий диапазон оси J1 | ±172° |
| Рабочий диапазон оси J2 | +72° / -140° |
| Рабочий диапазон оси J3 | +150° / -80° |
| Рабочий диапазон оси J4 | ±360° |
| Рабочий диапазон оси J5 | ±125° |
| Рабочий диапазон оси J6 | ±360° |
| Допустимый момент оси J4 | 22 N.M |
| Допустимый момент оси J5 | 22 N.M |
| Допустимый момент оси J6 | 10 N.M |
| Допустимая инерция J4 | 1 кг/м2 |
| Допустимая инерция J5 | 1 кг/м2 |
| Допустимая инерция J6 | 0.2 кг/м2 |
| Количество осей | 6 |
| Грузоподъемность (КГ) | 10 |
| Грузоподъёмность робота (КГ) | 10 |
| Максимальная скорость оси J1 г/с | 125°/с |
20 марта 2026
Роботизация процесса укладки в пищевой промышленности
22 августа 2025
История "Галактики": автоматизация сварки металлоконструкций
9 июня 2025
Роботизация «своими руками» : история Анны Любушкиной из ООО «КраМЗ»
23 мая 2025
REDEDUCATION PRO в Самарском университете имени академика С.П. Королёва
