
27 марта 2026
Как 16 летние школьники управляют промышленными роботамиREDEDUCATION PRO на чемпионате в Калуге
Подробнее

Отправьте ТЗ на почту: SalesTR@technored.ru
Ответим вам в течении двух часов в рабочее время.

Кнопки экстренного выключения для безопасной работы персонала.
Управление движениями и скоростью робота при помощи джойстика. Возможность последовательного реверсивного воспроизведения.
ПО с открытым исходным кодом. Возможность замены интерфейса.
Оснащен интерфейсом USB, поддерживает импорт/экспорт рабочих программ.
Степень защиты IP43
Вес 1,57 кг
Габариты 355 х 235 х 54 мм
Длина кабеля пульт-контроллер 4 м


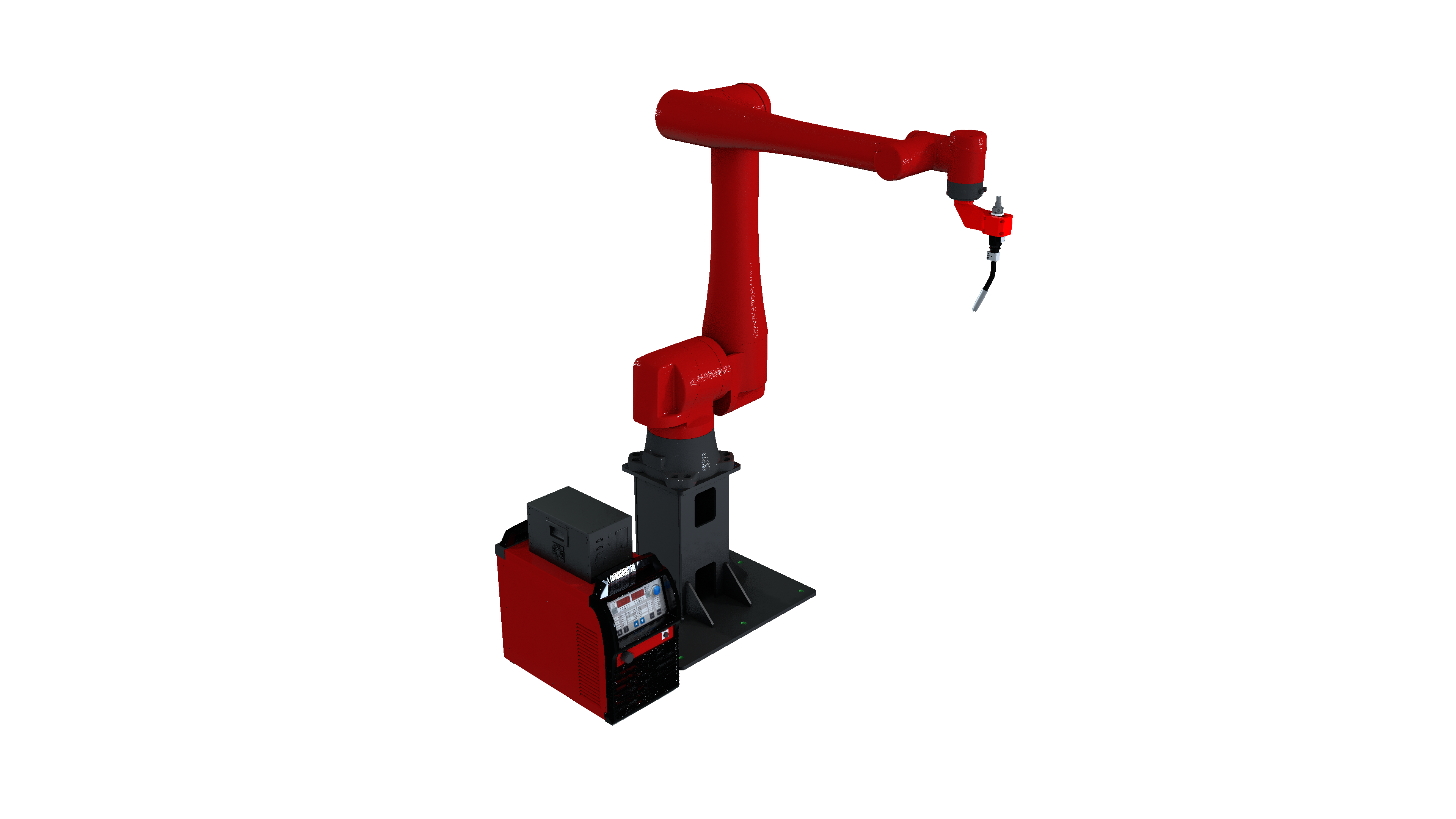
| Линейки продукции | REDS |
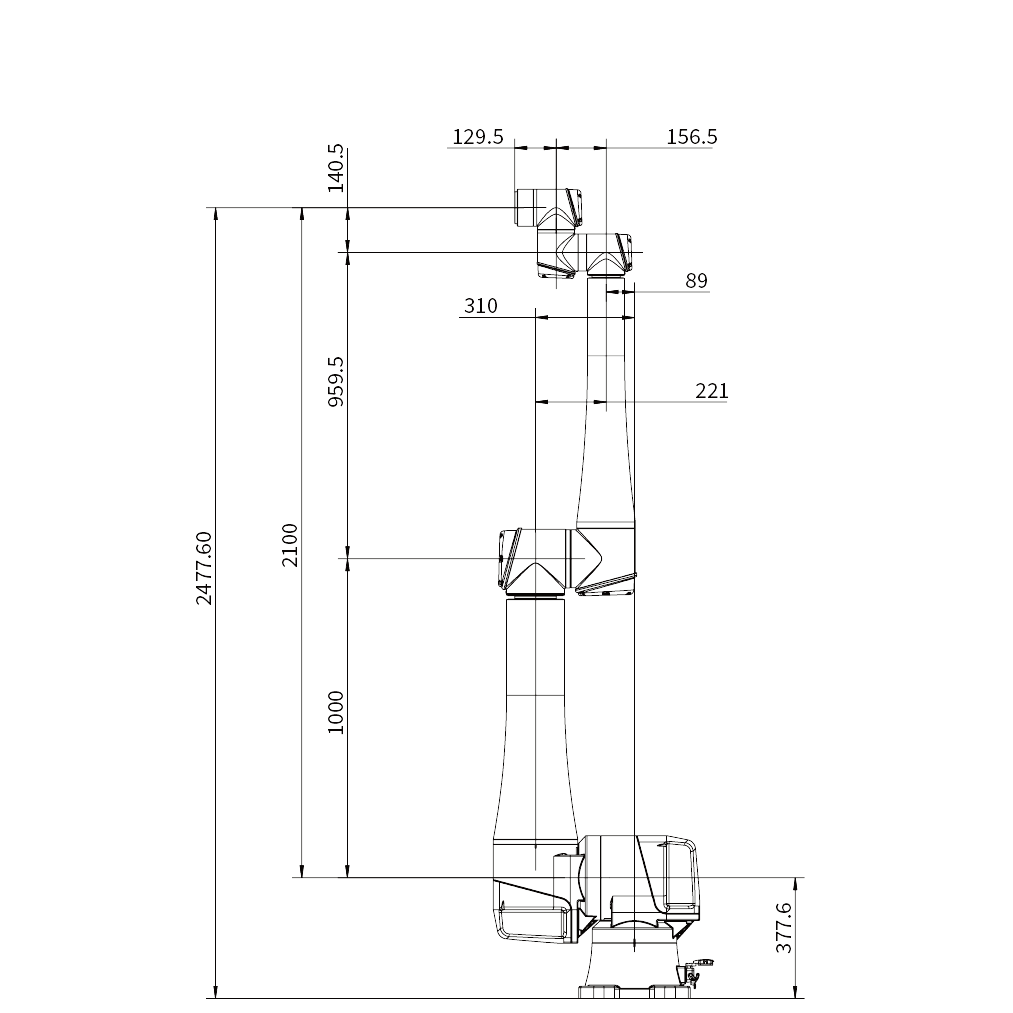
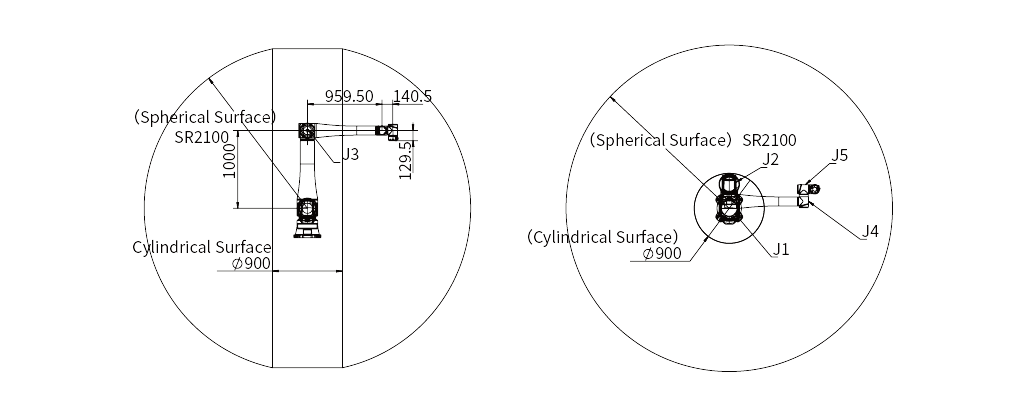
| Радиус действия (мм) | 2100 |
| Вес | 155 кг |
| Диаметр монтажной поверхности | ⌀425 |
| Линейная скорость (м/с) | ≤6.0 |
| Максимальная мощность, Вт | 6000 |
| Степеней свободы | 6 |
| Досягаемость, мм | 2100 |
| Повторяемость позиционирования, мм | ±0,05 |
| Степень защиты IP | 67 |
| Грузоподъемность (КГ) | 35 |
| Грузоподъёмность робота (КГ) | 35 |
27 марта 2026
Как 16 летние школьники управляют промышленными роботами
20 марта 2026
Роботизация процесса укладки в пищевой промышленности
22 августа 2025
История "Галактики": автоматизация сварки металлоконструкций
9 июня 2025
Роботизация «своими руками» : история Анны Любушкиной из ООО «КраМЗ»
23 мая 2025
REDEDUCATION PRO в Самарском университете имени академика С.П. Королёва